
Сегодня будем делать из гироскутера, более известного во всем мире под названием Hoverboard, электрический трайк, подходящий для передвижения инвалида и не только.
Какое-то время тому назад народ накупил гироскутеров за неприличные деньги, спустя года три кто-то осознал бесполезность этой игрушки, у кого-то сдохли аккумуляторы — а их в ближайшем магазине, как правило, не продают.
Да и не у каждого есть желание попользоваться отверткой, чтобы аккумулятор поменять. Кроме того, цены на новые гироскутеры сильно упали. В итоге бывший в употреблении скутер можно купить за 30…60 евро. Есть чудики, которые пытаются продать дороже 100 евро — но это надо нарваться на второго такого же, который готов заплатить за кота в мешке (по финской версии — свинья в мешке) дороже, чем сейчас новый стоит. Я покупал на tori.fi — но это актуально, если вы живете в Финляндии.

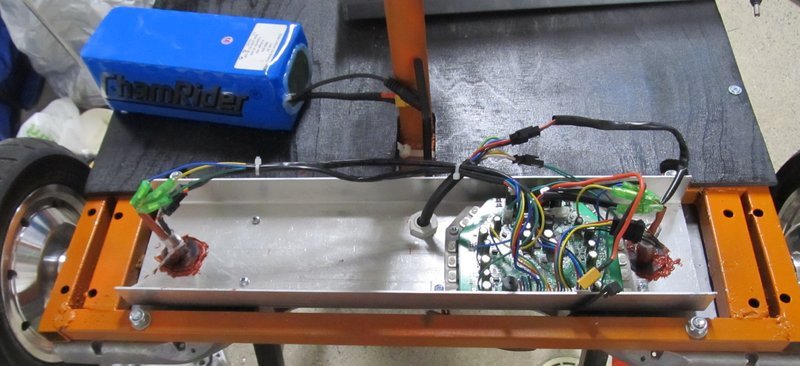
Для начала разбираем эти сумасшедшие колесики и смотрим что у них внутри.
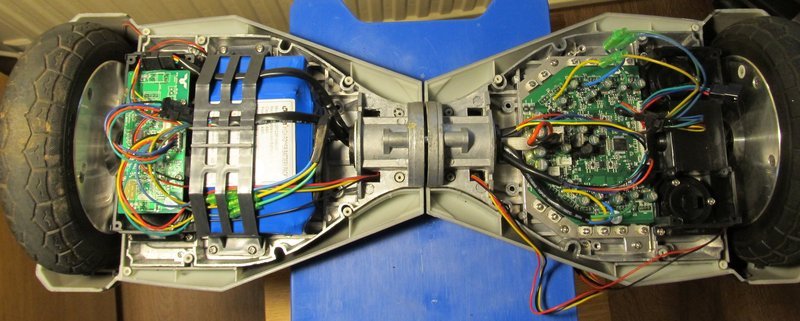
Аккумулятор — как правило, на нем написано 4.4 амперчаса 36 вольт — т.е. батарея 2p10s из ячеек 18650.

По бокам две платы с широко известными в узких кругах 6DOF IMU MPU6050.
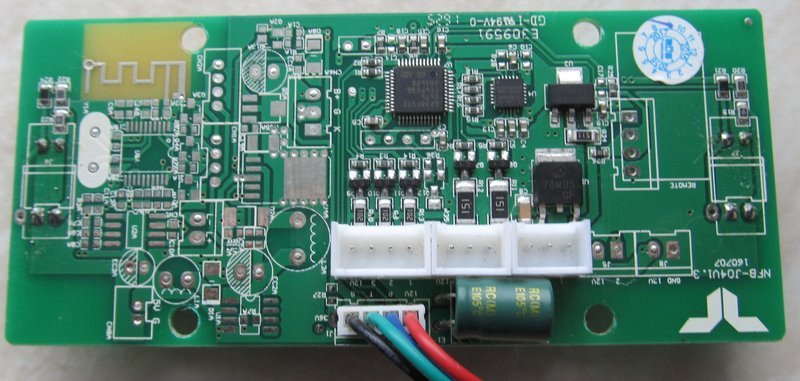
Силовая плата управления моторами на базе микропроцессора STM32F103RCT6 или китайского аналога GD32F103RCT6 — что, впрочем, без разницы.
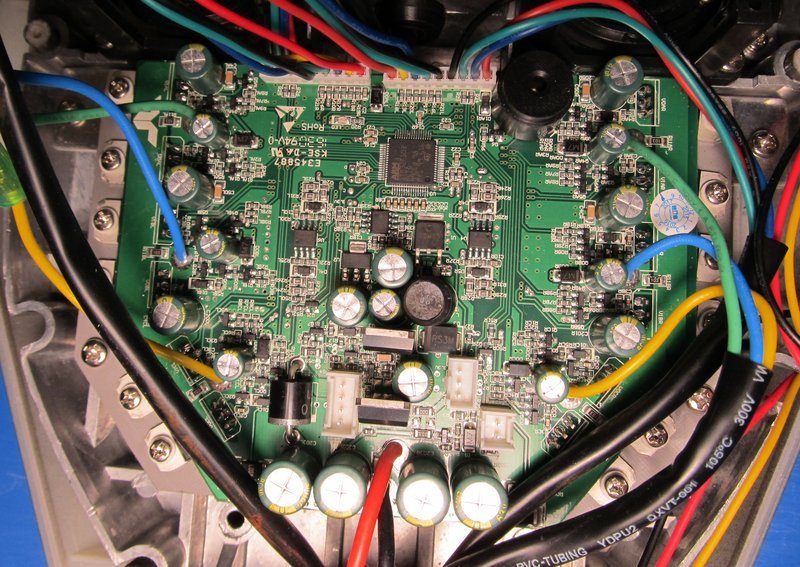
Драйверы для управления полевыми транзисторами, коммутирующими обмотки хаб-моторов, собраны на куче транзисторов, которые с успехом заменяют копеечную микросхему наподобие IR2110. Зачем так сделано — сие науке неизвестно.
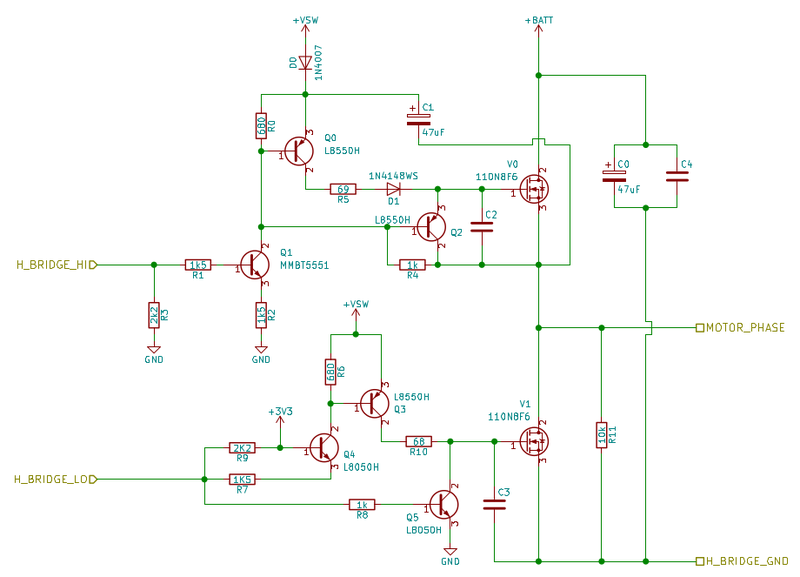
Еще одно чудо враждебной техники — понижающий преобразователь. Несколько транзисторов — такое решение я встречал несколько десятков лет назад. Схема — Кирича и других перфекционистов источников питания попросим отвернуться.
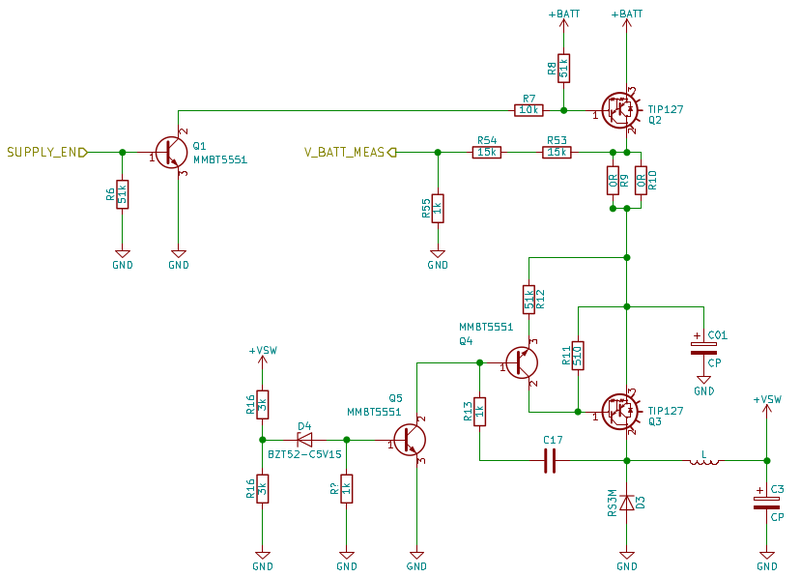
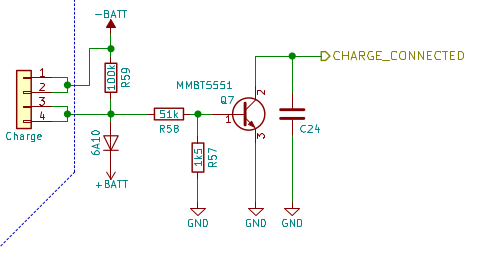
При зарядке последовательно с батареей почему-то оказался включен диод, причем с дико большим падением напряжения — 1 вольт. Зарядка используется стандартная на 42 Вольта, поэтому самый жирный последний Вольт аккумулятору не достается, он заряжается всего до 41 вольта.
Несмотря на все выше сказанное, плата прекрасно работает и с небольшими модификациями она практически одинакова в большинстве гироскутеров.
Есть еще какие-то платки с моргающими светодиодами, поющий bluetooth с динамиком, но они на скорость никак не влияют.
Все это может криво-косо использоваться как есть, но гораздо лучше воспользоваться альтернативным программным обеспечением. По моему мнению, лучший вариант — github.com/EmanuelFeru/hoverboard-firmware-hack-FOC. Можно использовать движение накатом и легко реализуется торможение. К сожалению, без рекуперации — но для транспорта с такими маленькими колесами это не особо актуально.
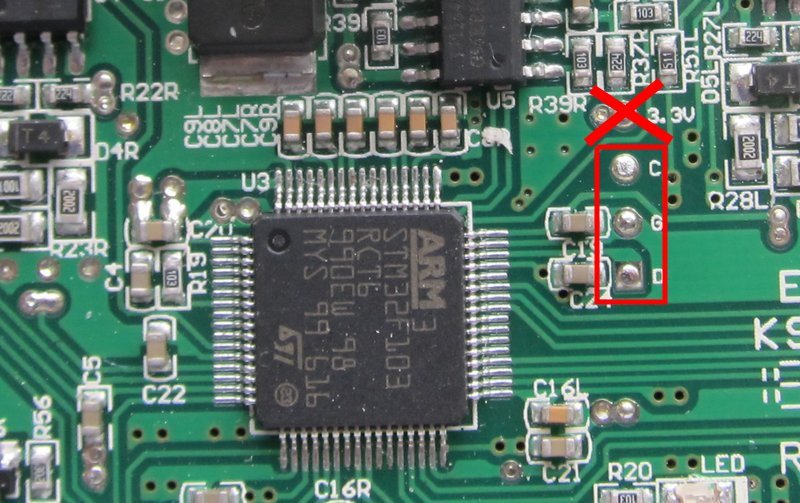
Для прошивки понадобится программатор ST-link, цена китайского клона на Али в районе полутора евро. Во всех описаниях альтернативных прошивок сказано — не запитывайте при прошивке плату от программатора, включите питание от батареи или внешнего блока питания, подключенного вместо батареи. Я не поверил — как дохленькие 3.3 Вольта от программатора могут что-то сжечь? Оказывается, очень даже могут — процессор сдох, пришлось новый впаивать. Точки подключения программатора:
Программное обеспечение конфигурируется. В plaformio.ini нужно выбрать ваш вариант управления — в моем случай это UART:
;=================== VARIANT SELECTION ==========================
;
; Choose one or all variants get built
;
;default_envs = VARIANT_ADC ; Variant for control via ADC input
default_envs = VARIANT_USART ; Variant for Serial control via USART3 input
;default_envs = VARIANT_NUNCHUK ; Variant for Nunchuk controlled vehicle build
В файле config.h нужно выбрать алгоритм управления:
// Control selections
#define CTRL_TYP_SEL FOC_CTRL
Если нужно движение накатом, электронный дифференциал и прочие плюшки — FOC — правильный выбор.
Как правило, измерение напряжения работает неправильно — подстраивается строкой
#define BAT_CALIB_ADC 1595
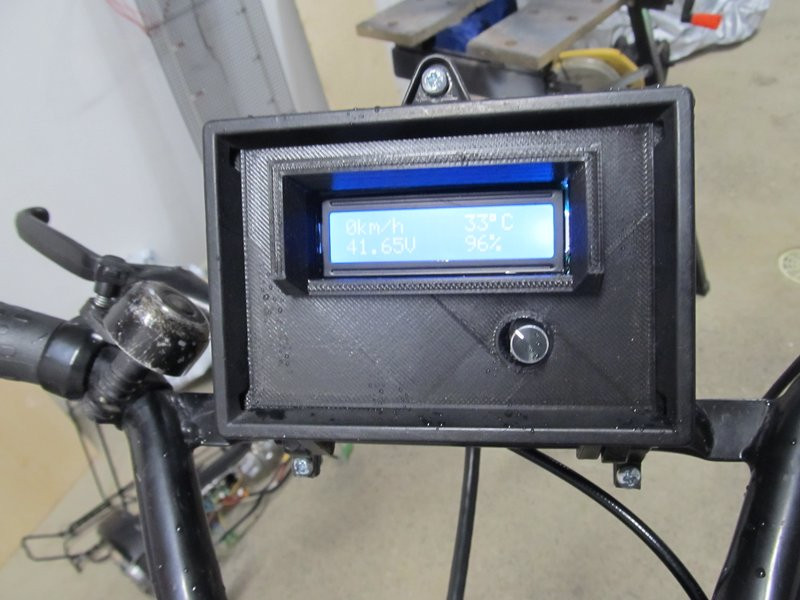
Чтобы долго не заморачиваться — посмотрел, какое напряжение выдает UART с калибровкой по умолчанию, измерил напряжение на батарее и пропорционально ошибке изменил калибровочный коэффициент. Так же подстраивается и коэффициент для измерения температуры платы — в моем случае ошибка была всего 2 градуса — оставил все, как есть.
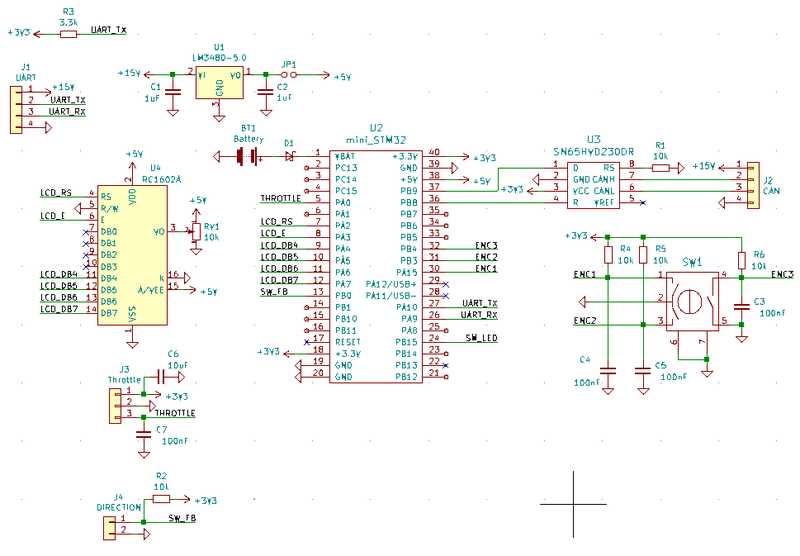
Для управления трайком сделал контрольную панель на том же STM32 — на входе пока ручка управления газом по типу мотоциклетной с переключателем вперед/назад. На будущее планируется электрический тормоз на задние колеса — но рукоятка еще где-то в пути. Пока приходится довольствоваться механическим тормозом на переднее колесо.


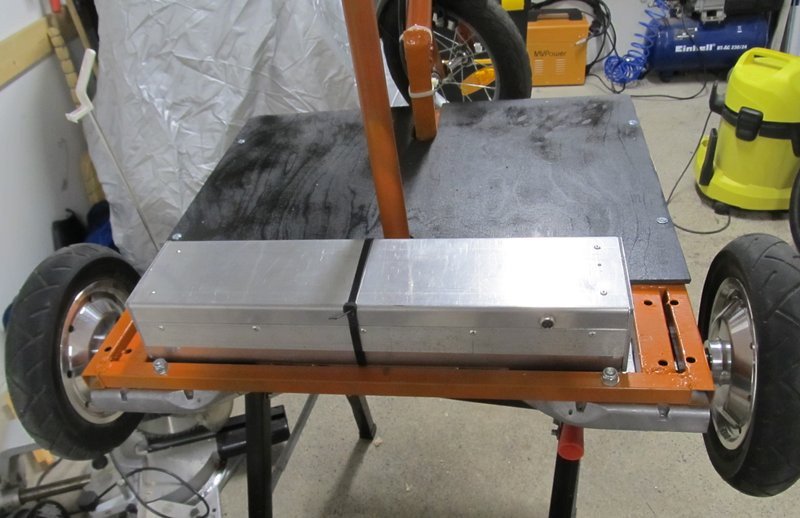
Сама конструкция проста, как мыло. За сварку попрошу не критиковать — сварщик я не настоящий. Кроме того — пепелац делался для инвалида инвалидом (помоги себе сам) — а вижу я плохо ниже уровня глаз, бинокулярное зрение не работает. Чтобы что-то варить — электрод надо держать двумя руками и с опорой под локти. Мне еще свезло — порой люди с подобными симптомами ложку ко рту не могут самостоятельно поднести. Короче — работал слепой сварщик с дикого похмелья 🙂
Нарезаем трубки и части от донора-детского велосипеда

и свариваем все вместе

красим

собираем

тестируем

переделываем
наслаждаемся результатом.

Получившийся пепелац на батарее 10а/ч проезжает немногим больше 15км (больше не пытался — тащить его с севшей батареей на себе не улыбается). Скорость — максимум 25 км в час, но с такими маленькими колесиками без подвески и амортизаторов больше 15-20 км в час ездить не стоит. Ну и гравицапу помощнее поставить надо — 15 километров маловато будет.
")


")


")
